

刚柔耦合腿足机器人主被动顺应控制研究
最受欢迎奖
资助企业:
 杭州科捷模型有限公司
杭州科捷模型有限公司
资助年份: 2026
企业导师: 朱春良

指导教师: 陈根良
项目成员: 肖家瑞、蔡璟涵、李卓文
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
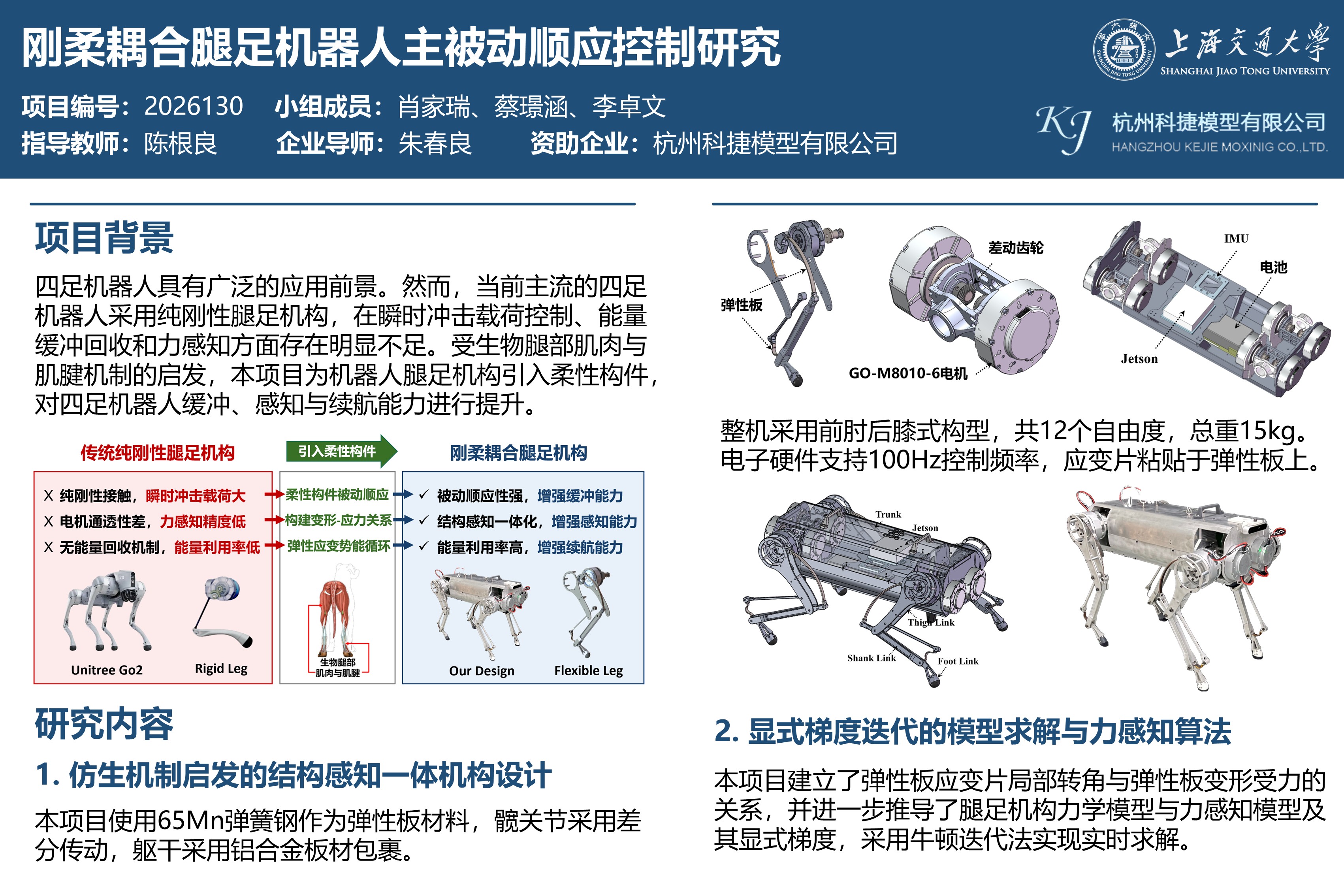
面向灾害救援、工业巡检和复杂环境作业等应用场景,四足机器人需要在碎石、台阶、斜坡和局部障碍等非结构化地形中保持稳定移动。现有纯刚性腿足机构主要依赖电机驱动和高频控制处理足地交互,但触地冲击具有高频、瞬态和强非线性特点,容易在传感、计算和执行链路完成补偿前,沿刚性传力路径传递至连杆、齿轮和电机;同时,缺少可观测的柔性承力元件也限制了机器人在弹性能量调制和足端力感知方面的拓展能力。为此,本项目以刚柔耦合四足机器人为研究对象,在腿足主要传力路径中引入可设计、可建模、可测量的弹性板,构建融合被动顺应、结构感知和主动控制的运动系统。
项目目标
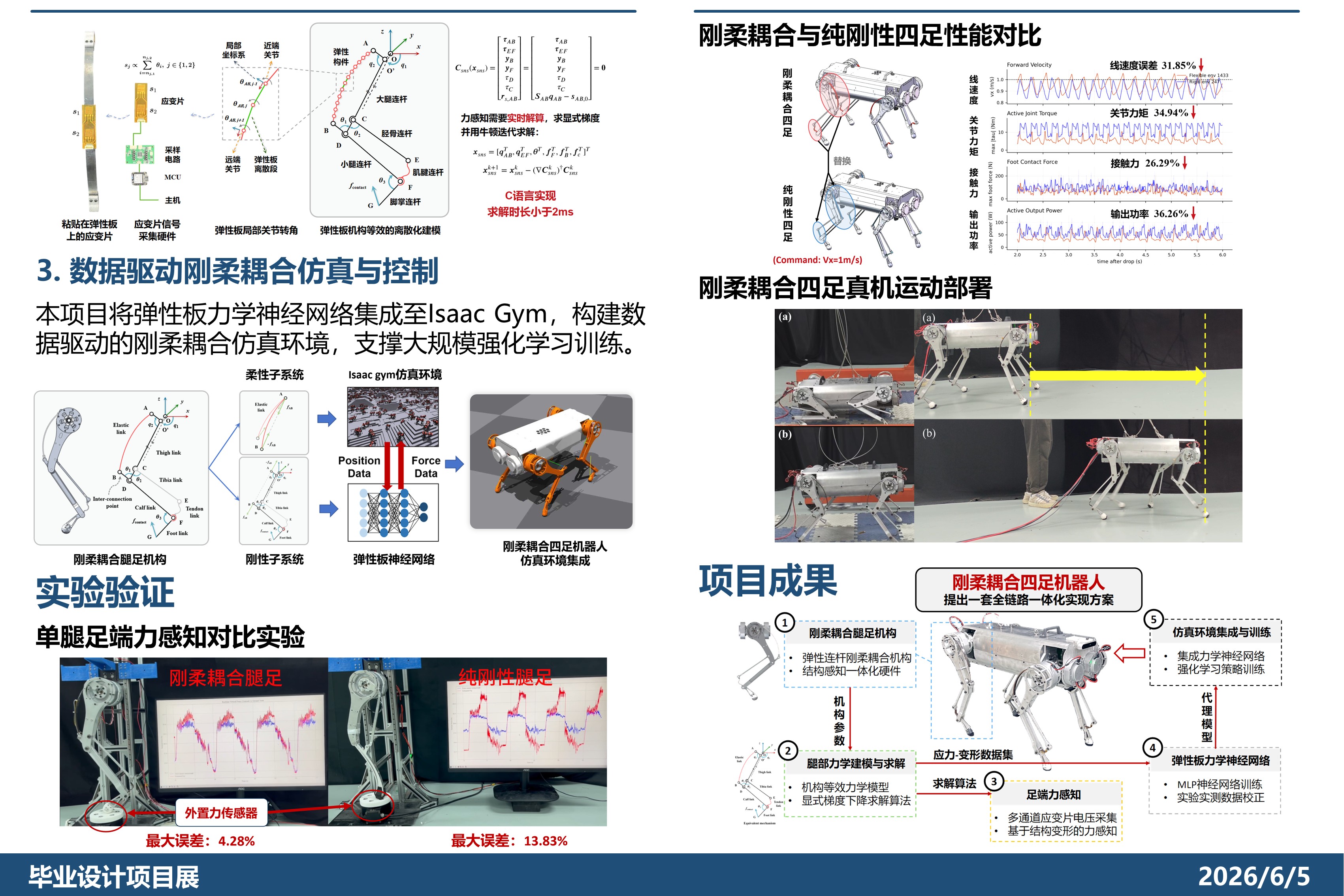
本项目总体目标是设计开发刚柔耦合四足机器人系统,全面验证弹性腿足结构在冲击缓冲、能量调制与力感知维度的工程应用价值。具体分为三项核心技术目标:首先,完成前肘后膝式机械样机设计,引入双弹性板并配置差分髋关节以显著降低腿部转动惯量。其次,建立大挠度弹性板离散化准静态模型,训练出神经网络代理模型以高效支撑实时仿真环境与控制闭环。最后,搭建集成底层多路通信、多源状态估计与Teacher-Student强化学习算法的分层控制系统,并在真机平台上完成实验验证。
项目成果
本项目围绕“机构顺应、模型仿真、感知反馈、控制闭环”的技术路线,实现了刚柔耦合四足机器人的全链路一体化开发。在机械层面,采用前肘后膝构型与差分髋关节,并引入65Mn弹性板提供缓冲与弹性储能能力。在建模方面,建立弹性板力学模型并训练神经网络代理模型,通过刚柔子系统解耦将其接入Isaac Gym环境,满足后续强化学习大规模实时仿真的需求。在控制层面,搭建了融合多源状态估计的分层实时控制系统,基于PPO与Teacher-Student架构训练运动策略并有效补偿了系统延迟。最终验证表明,项目成功完成了刚性平台的跨障行走以及刚柔样机的低速闭环验证,为后续复杂地形运动和能量调制控制奠定了坚实的软硬件基础。




