

基于视觉-力-位姿多模态的插拔件自动装配技术研究
最受欢迎奖
资助企业:
 上海优异达机电有限公司
上海优异达机电有限公司
资助年份: 2026
企业导师: 姬晓峰

指导教师: 戚进
项目成员: 贾清珂 黄奕博
 项目海报
项目海报


 项目视频
项目简介
项目视频
项目简介
项目概述
在面对轴孔装配类接触密集型任务时,纯视觉的模仿学习算法会存在过度依赖视觉而导致泛化能力差,缺乏三维信息而导致对空间建模能力不足,缺乏力反馈而导致柔顺控制不足,所以我们引入装配件位姿信息和力觉信息作为视觉表征的补充,开展基于视觉-力-位姿多模态的插拔件自动装配技术研究。
项目目标
本项目聚焦工业自动化装配领域中插拔件装配这一高精度、密集接触的复杂度任务,旨在通过视觉、位姿与力觉信息同步采集、模仿学习动作预测的两个阶段技术链路,搭建人类演示数据采集系统,构建融合力觉信息融入和装配件位姿信息的模仿学习算法架构,最终实现融合多模态信息输入下机械臂插拔件的自动装配。
项目成果
1)搭建了基于混合现实头显以及外骨骼遥操作数据采集设备
2)针对三个装配任务,完成了多模态数据采集和时间对齐
3)优化高精度装配件位姿检测算法,完成装配件位姿信息的稳定追踪
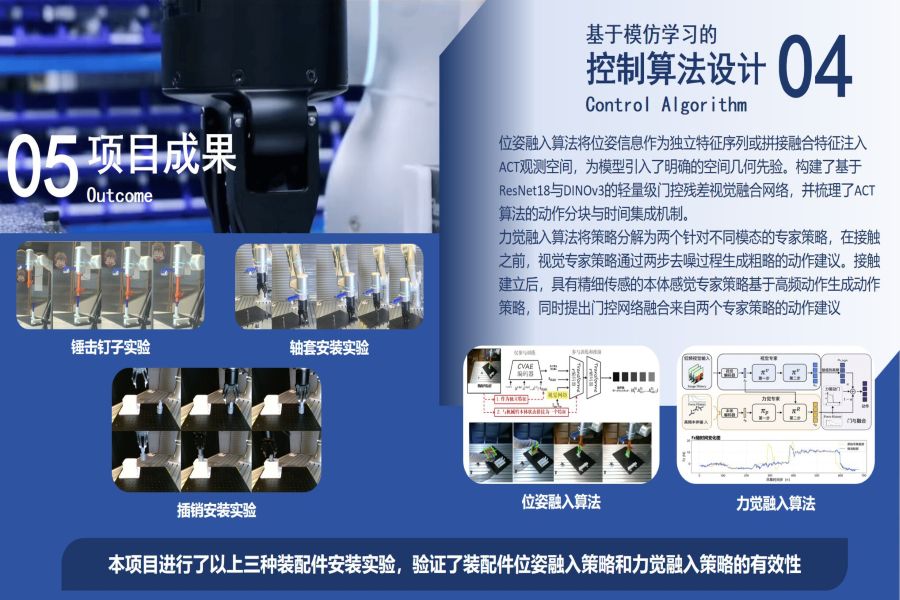
4)提出视觉-力觉双专家模型门控融合架构,实现分阶段模仿学习策略实现
5)提出多模态感知信息的门控融合架构,实现分阶段视觉特征获取
6)开展多组装配件实机推演实验,验证模型策略的有效性




