

面向浅水水域的高扩展性小型水下机器人总体设计
最佳展示奖
资助企业:
 亿钛极客科技(上海)有限公司
亿钛极客科技(上海)有限公司
资助年份: 2026
企业导师: 刘奕兵

指导教师: 张亚欧
项目成员: 李帅达 郭佳铭 孟岩 彭丹语
 项目海报
项目海报

 项目视频
项目视频
 项目简介
项目简介
项目概述
本项目面向浅水水域水产养殖监测、近海风电运维及水下工程维护等应用场景,针对现有小型遥控潜水器(ROV)普遍存在的结构笨重、控制精度低、传感融合不足及作业能力有限等核心问题,开展小型ROV系统的总体设计与开发。项目以"轻量化、高精度、强扩展、高可靠"为核心定位,由机械结构、运动控制、多传感器数据融合及水下机械臂四个子系统协同构成,成功研发了一套模块化微型ROV原型系统。整机重量不超过8 kg,具备50 m工作深度和1.5 m/s最大航速,搭载四自由度水下机械臂与双目视觉系统,实现了从"观察型"到"作业型"的能力跨越,为浅水智能化作业提供了完整的工程解决方案。
项目目标
本项目旨在自主设计与开发一款模块化紧凑型微型ROV系统,核心目标包括:(1)高精度六自由度运动控制,设计双环SQRT-PID姿态控制器与速度闭环平移控制器,结合物理模型前馈与扩张状态观测器(ESO)扰动补偿,实现近水面扰动环境下的稳定悬停与轨迹跟踪;(2)多传感器融合定位,建立七维扩展卡尔曼滤波(7D-EKF)框架,融合IMU、磁力计与深度计数据,实现可靠的水下位姿估计;(3)水下轻量级作业能力,搭载四自由度拟人臂式机械臂与双目视觉系统,实现水下目标识别与抓取。主要技术指标包括姿态控制精度±2°、深度控制精度±5 cm、机械臂水下抓取能力0.5 kg、连续工作时间不少于1小时。
项目成果
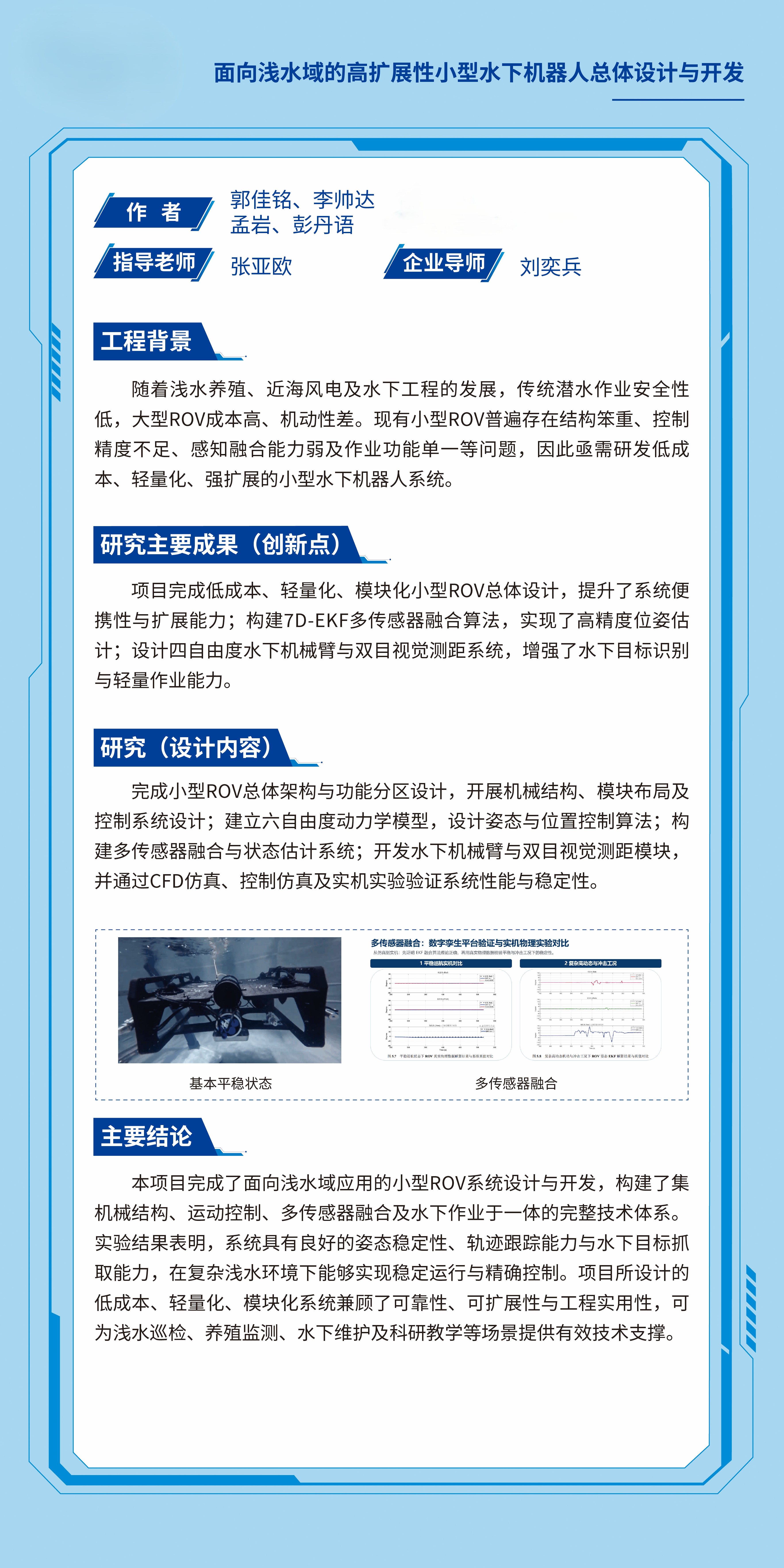
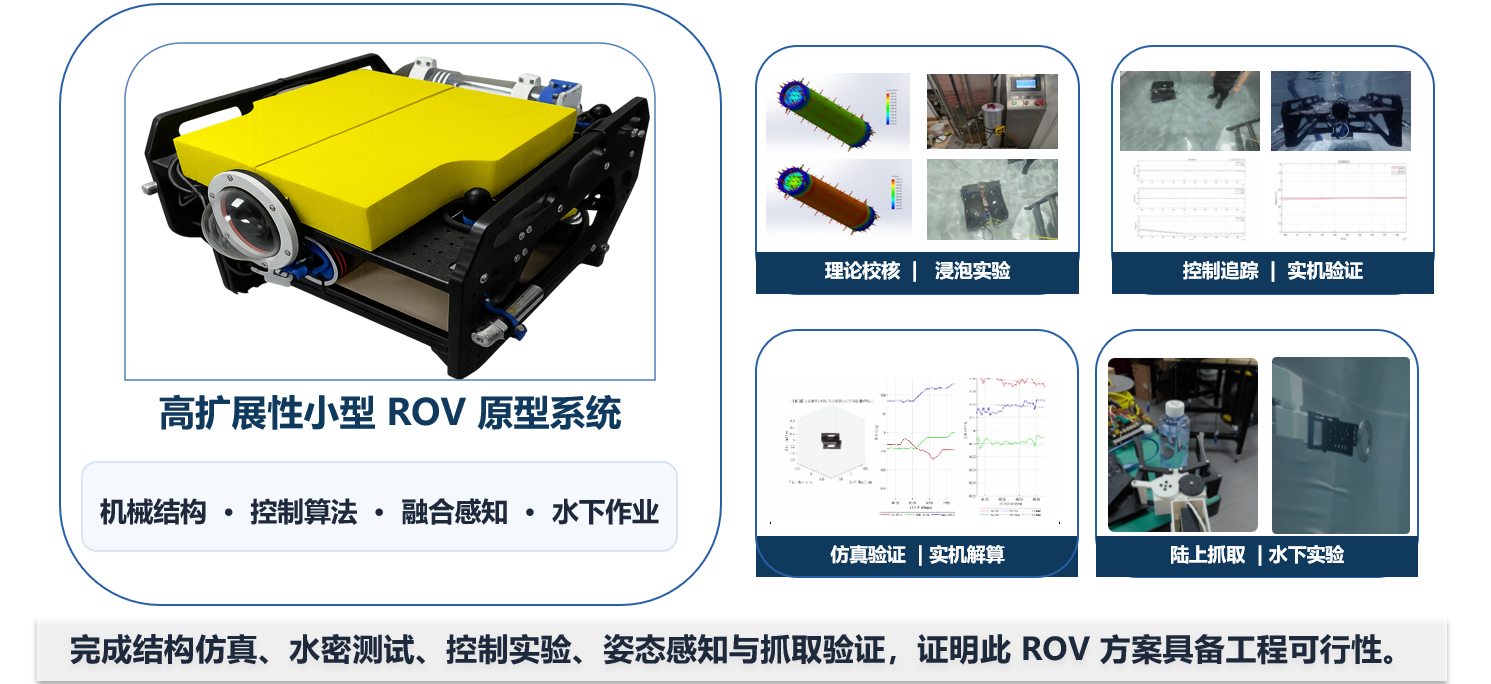
本项目围绕小型ROV系统设计与开发,取得了以下四方面成果:(1)机械结构——完成HDPE模块化开架式框架与"4+4"八推进器矢量布局,设计了双重O型圈密封PC耐压舱及活塞式主动浮力调节系统,经有限元仿真和静水加压试验验证了结构可靠性;(2)运动控制——建立六自由度Fossen水动力模型,设计SQRT-PID双环姿态控制器与过驱动伪逆推力分配方案,基于C++多态机制实现嵌入式统一设备调度框架,在STM32F4平台上达到500 Hz主循环控制频率;(3)多传感器融合——提出基于最小二乘与特征值分解的磁力计椭球标定算法、七维EKF融合引擎、三点阵列水压差分姿态观测模型、连续衰减因子式自适应抗冲击机制以及基于DWT硬件打标与环形缓冲区的多速率OOSM时间同步方案;(4)水下作业——设计四自由度拟人臂式机械臂、四连杆平行抓夹及基于双目视差原理的水下目标测距系统。经STAR-CCM+ CFD仿真、MATLAB/Simulink控制仿真、数字孪生融合系统验证及实机水池综合试验,全面验证了系统在静水环境下的位置跟踪、姿态稳定与水下目标抓取能力。




