

面向复杂环境的四轮足机器人感控一体控制方法研究
“优秀设计”优胜奖
资助企业:
 杭州行思无界科技有限公司
杭州行思无界科技有限公司
资助年份: 2026
企业导师: 田园

指导教师: 齐臣坤
项目成员: 尹思源 陈嘉一 林千翔
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
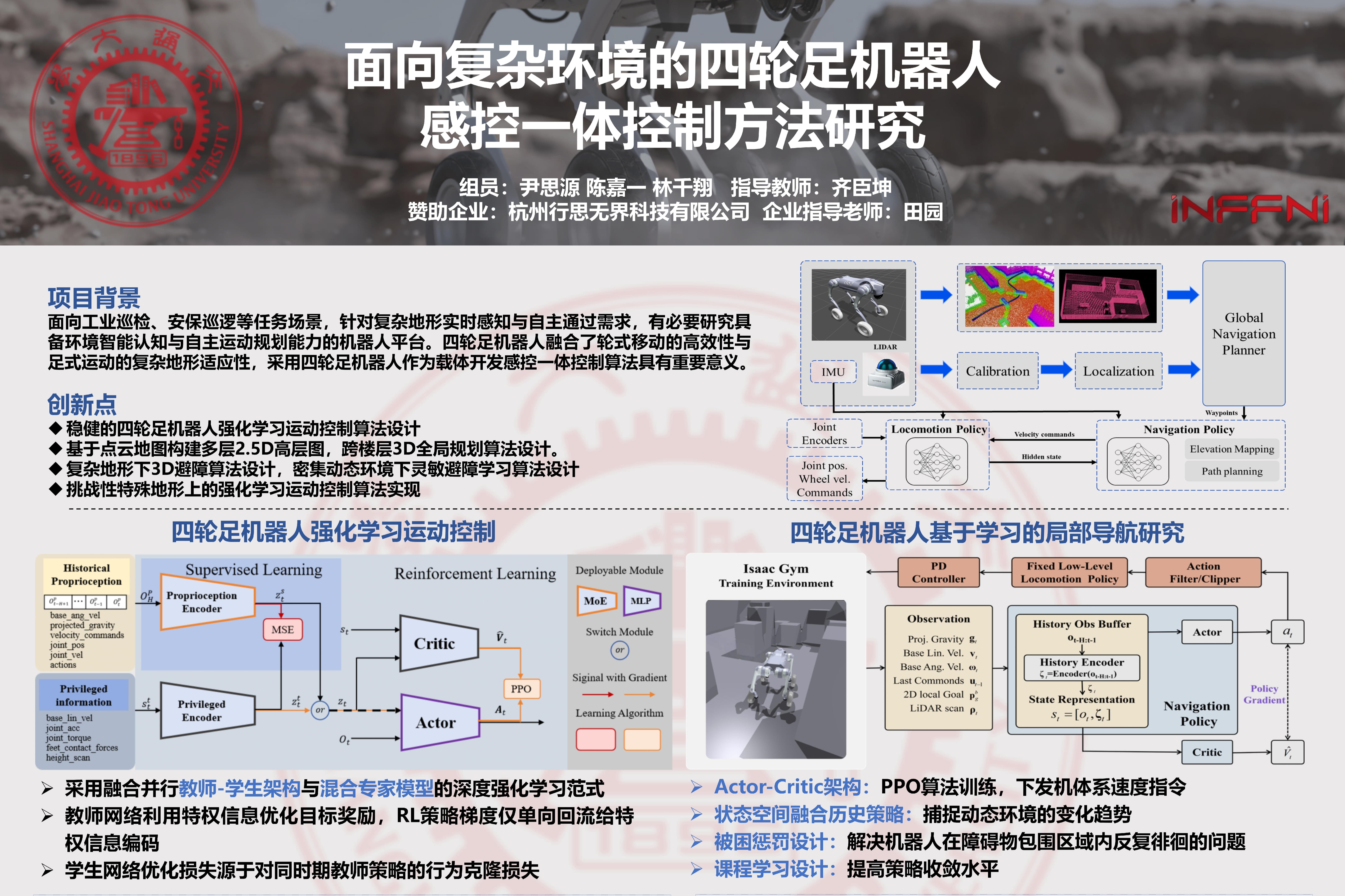
面向电力巡检、消防巡检、建筑巡查、安保巡逻等任务场景,针对复杂地形实时感知与自主通过需求,有必要研究具备环境智能认知与自主运动规划能力的机器人平台。轮式或足式机器人往往难以兼顾移动效率与地形适应性。四轮足机器人融合了轮式移动的高效性与足式运动的复杂地形适应性,应用价值广泛。但是,复杂地形环境下的机器人自主性能高度依赖于环境感知与运动规划算法的协同。因此,本项目以四轮足机器人为载体开发集成环境感知、决策规划与运动控制于一体的软件系统。
项目目标
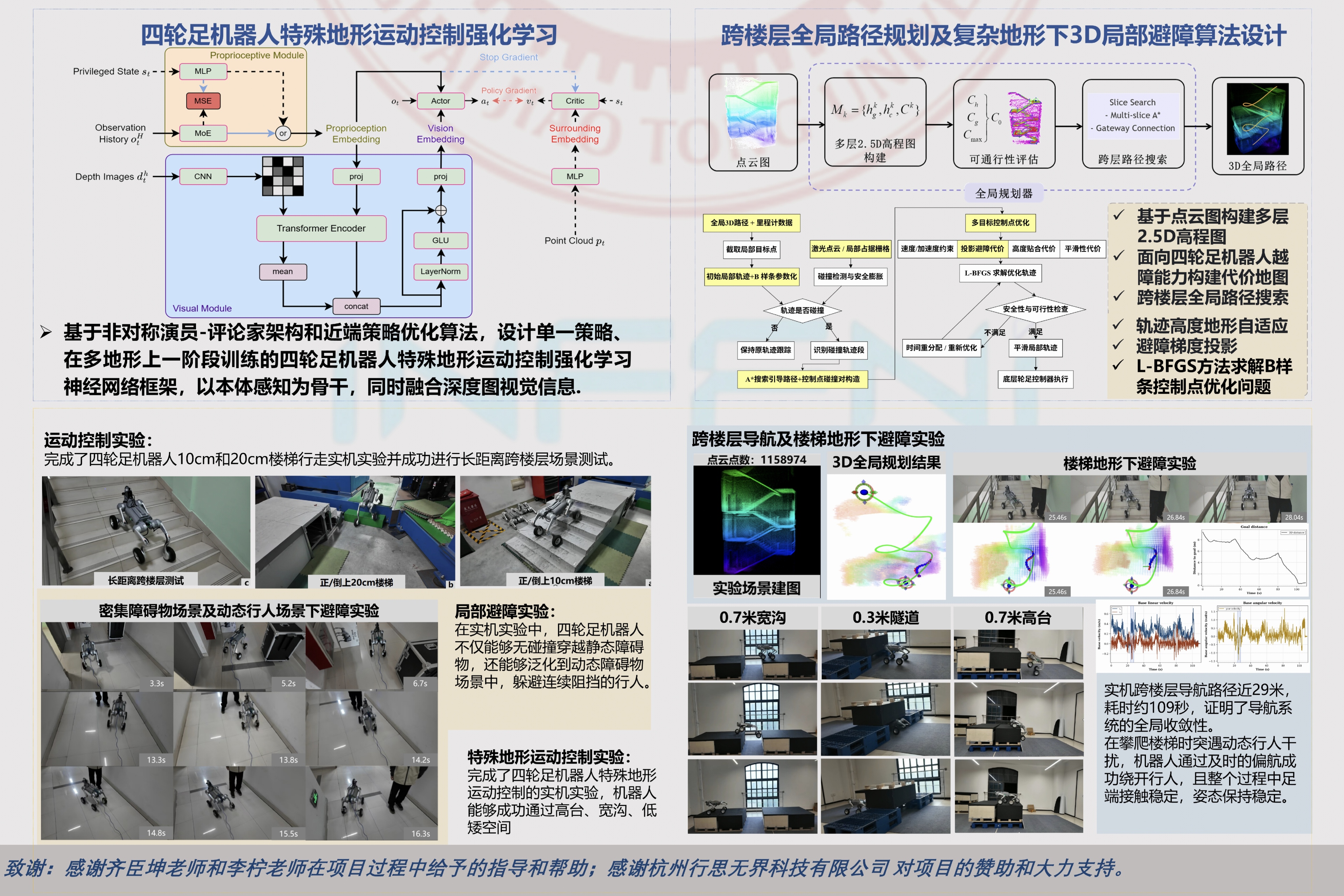
本项目需突破四轮足机器人在动态复杂地形环境中的实时环境感知、强化学习运动控制等关键技术,开发集成环境感知、决策规划与运动控制于一体的软件系统,搭建软硬件测试平台并开展实际环境验证,为提升四轮足机器人在复杂室内外场景下的自主作业能力提供核心算法支撑。最终开发出满足应用需求的四轮足机器人感知规划算法、四轮足机器人运动控制和局部导航控制算法、四轮足机器人特殊地形运动控制算法。
项目成果
(1)完成四轮足机器人感知-控制一体化强化学习的系统框架设计,包括软件训练框架和实时部署框架,开展复杂地形下的感控一体运动规划仿真。
(2)完成四轮足机器人的算法性能优化,面向室内外复杂地形通过需求,充分运用系统的灵活性和机载计算资源,完成地形自感知适应、移动稳定性、长续航节能等核心能力提升,并进行典型场景仿真测试。
(3)研制出四轮足机器人感知与控制系统训练软件1套,开发出集成控制软件1套,开展室内楼梯地形与野外环境场景验证,论证机器人的环境感知和地形通过能力,完成技术报告1份。




