

360°超广角衍射光三维成像技术
“优秀设计”三等奖
资助企业:
 湖南郎灵科技有限公司
湖南郎灵科技有限公司
资助年份: 2026
企业导师: 王金行

指导教师: 胡开明
项目成员: 李旸忞 黄缙珏 黄振峰
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
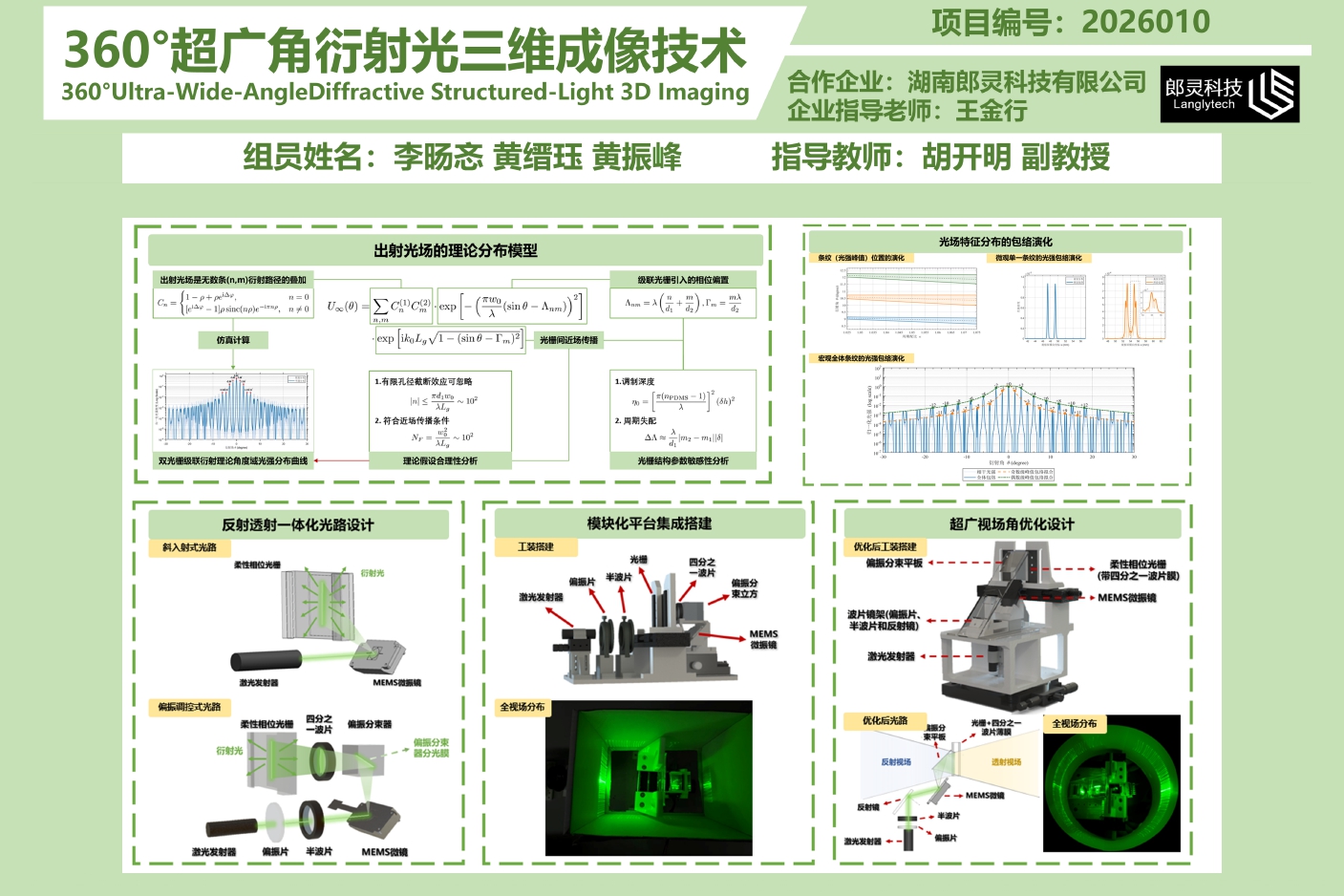
本项目面向大视场、高精度、快速三维成像需求,开展近360°全场衍射光三维成像系统研究。项目以双光栅级联衍射理论为基础,结合MEMS微镜与柔性可调谐光栅构建新型可调光学器件,实现衍射光场的快速扫描、动态调控与大范围覆盖。系统通过衍射条纹投射、图像采集、条纹级次辨别和深度反演等环节,获取被测物体表面的三维信息。相比传统面结构光、线激光扫描和RGB-D传感器方案,本项目力求在测量精度、视场范围和成像效率之间取得更优平衡。
项目目标
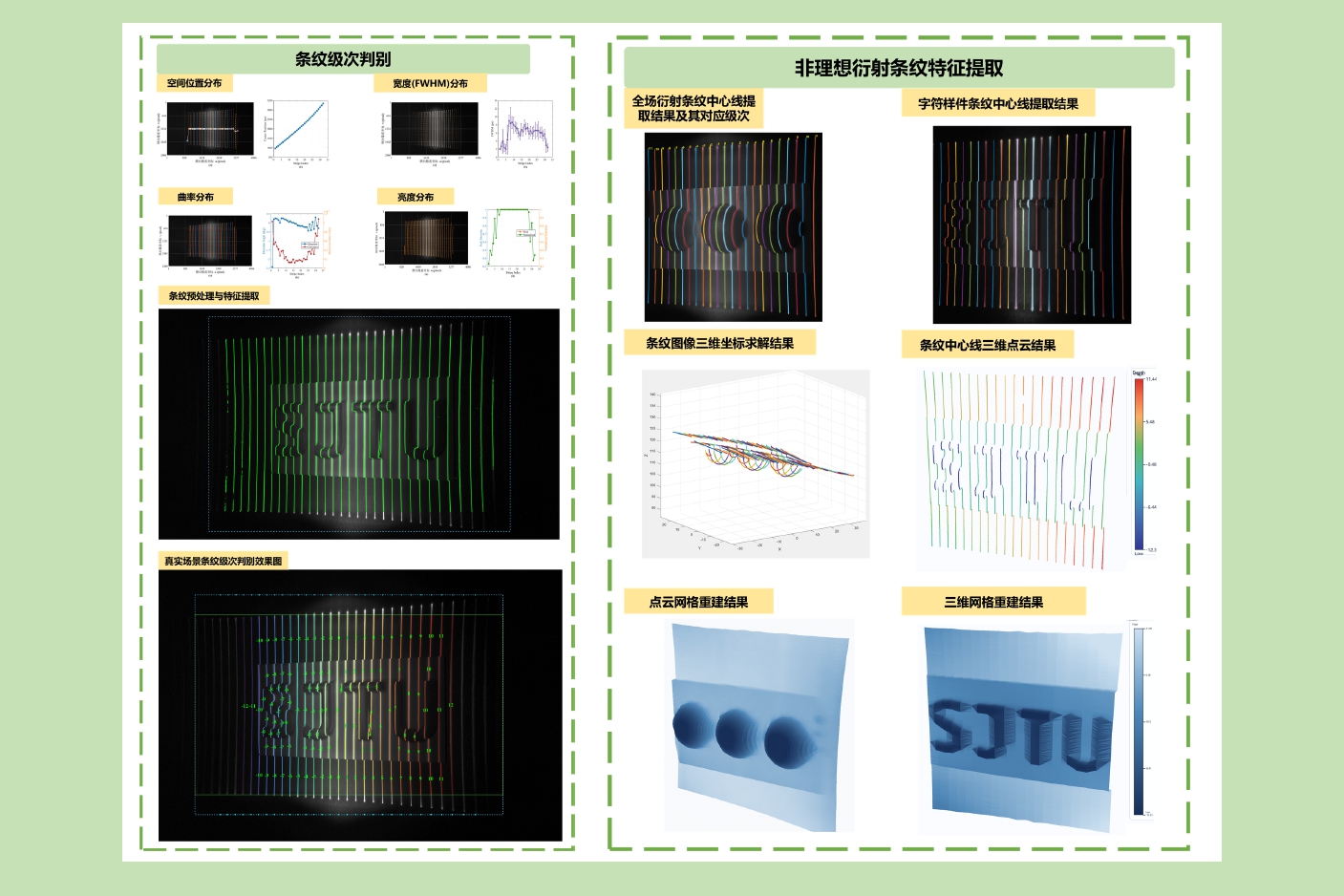
项目的主要目标是构建一套小型化、高精度、大视场兼容的近360°衍射光三维成像仪,并形成完整的理论、硬件和算法体系。在理论方面,建立双光栅级联衍射模型,分析衍射光强度分布、条纹宽度、亮度、曲率和连续性等特征;在硬件方面,设计MEMS微镜与柔性可调谐光栅协同工作的光路结构,实现光场自适应调控;在算法方面,完成多级次衍射条纹辨别、中心线提取、空间平面匹配和三维深度反演,最终实现大视场范围内的稳定三维重建。
项目成果
项目形成了“理论建模—系统搭建—算法反演—工程验证”的整体研究方案。主要成果包括:
(1)提出了面向双光栅级联结构的衍射条纹形成机理模型,为条纹生成和级次判别提供理论依据;
(2)完成了近360°全场衍射光三维成像仪的光路设计与平台搭建,融合MEMS微镜和柔性可调谐光栅,实现了动态光场生成机制;
(3)开发了包含预处理去噪、中心线提取、条纹级次辨别、深度反演和三维重建的核心算法流程,可支撑复杂工况下的大视场三维测量,为后续工程应用奠定基础。




