

“眼在手上”串番茄灵巧采摘机器人设计与控制
“优秀设计”一等奖
资助企业:
 中建材凯盛机器人(上海)有限公司
中建材凯盛机器人(上海)有限公司
资助年份: 2026
企业导师: 高昌颀

指导教师: 覃程锦
项目成员: 程乐烨,杨逸舟,郑翰宸,张硕
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
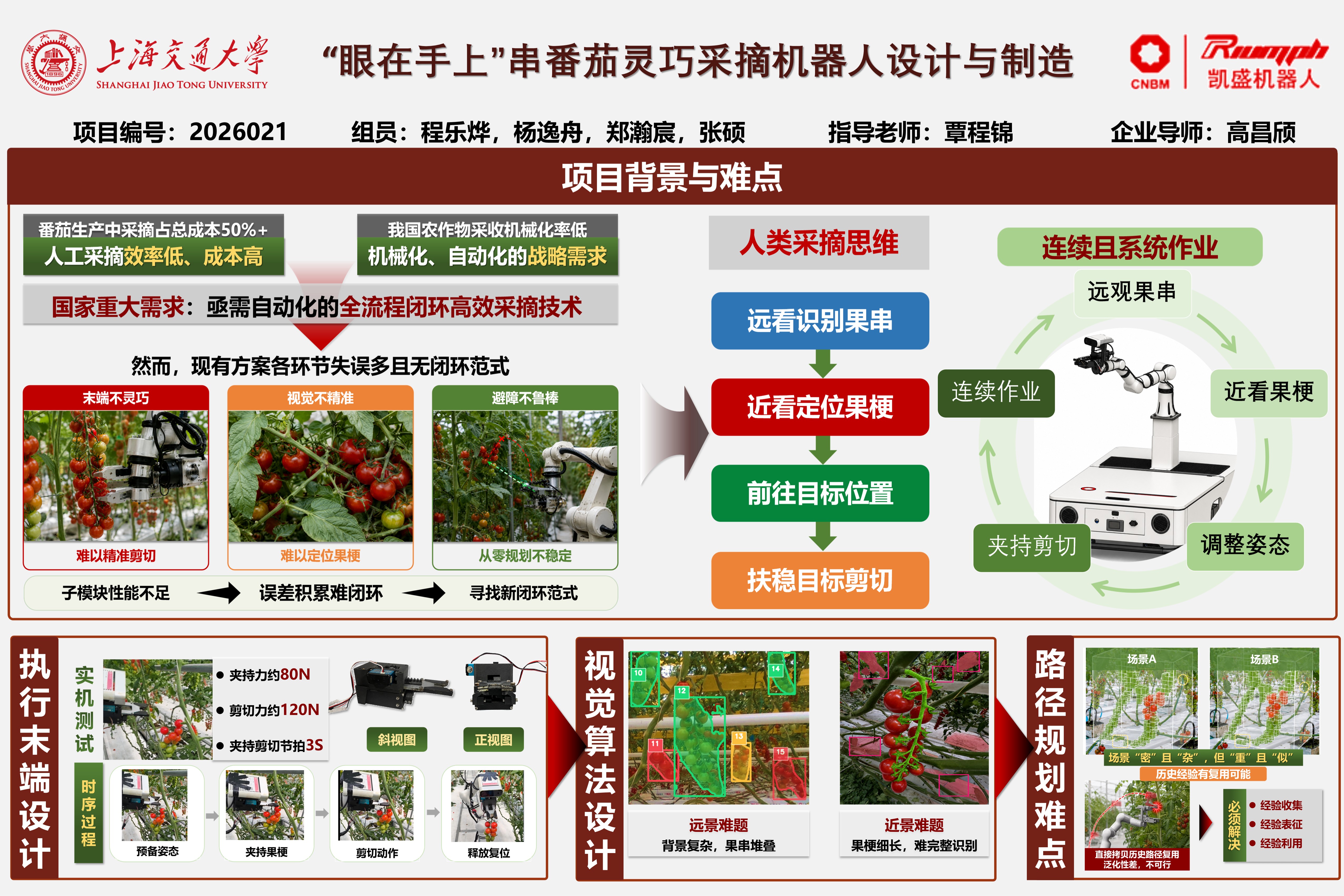
设施农业因面临人工采摘成本高、作业环境复杂及高品质果蔬稳定供给等需求,亟需具备自主识别、精准定位与低损采摘能力的智能机器人系统以应对温室串番茄非结构化采收场景。项目提出“眼在手上”串番茄灵巧采摘机器人,通过远景果串决策、近景果梗解算、经验驱动避障接近与夹持剪切一体化末端执行,实现从目标感知、路径规划到稳定剪切的全流程闭环作业,其远近协同视觉感知与轻量化夹剪末端机制可有效适应枝叶遮挡、果梗纤细及狭窄空间操作需求,显著改善了现有采摘机器人在果梗定位精度、末端灵巧性、避障稳定性与连续作业能力等方面存在的不足。
项目目标
面向温室串番茄复杂采摘场景,构建集“感知、规划、执行”于一体的自主采摘机器人系统,实现果串精准识别、安全避障接近与低损稳定采摘。
项目成果
投稿1篇SCI论文:Computers and Electronics in Agriculture (中科院一区,IF: 8.9,学生一作,小修接收):A Scenario-wise Exploring-to-Learning Planner Generation Approach for Robust Path Planning of Fruit-Picking Robot. Computers and Electronics in Agriculture (IF: 8.9)
发表1篇SCI论文:Sustainability (中科院二区,学生二作,已发表):Retrieval Augment: Robust Path Planning for Fruit-Picking Robot Based on Real-Time Policy Reconstruction.
投稿1篇SCI论文:Artificial intelligence in agriculture(中科院一区,IF: 12.4,学生三,四,五作,大修返回)YOLO11-FFTDA: Fusing Frequency-DomainEnhancement and Deformable Attention for Robust Tomato Pedicel Segmentation. Artificial intelligence in agriculture (IF: 12.4),under review
同时申请并公开发明专利三项:
1. 采摘机器人鲁棒路径规划方法及系统;CN 121468501
2. 蔬果采摘机器人路径规划方法及系统,CN 121857714A
3.串番茄采摘机器人果柄实例分割方法及系统, CN202610119334.3
获中国机械行业卓越工程师教育联盟第九届“精雕杯”毕业设计大赛团队金奖
获beat365中文官方网站优秀毕业设计项目一等奖




