

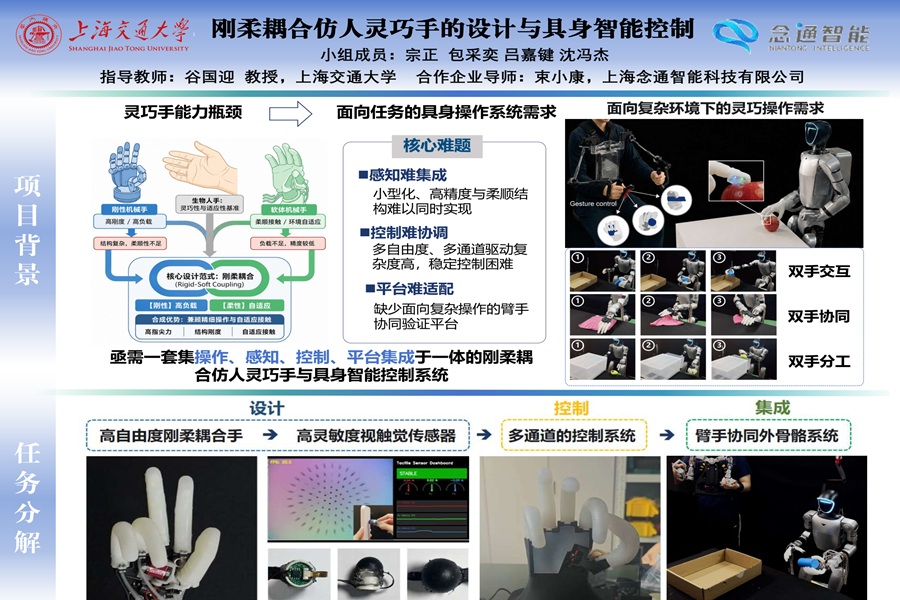
刚柔耦合仿人灵巧手的设计与具身智能控制
“优秀设计”一等奖
资助企业:
 上海念通智能科技有限公司
上海念通智能科技有限公司
资助年份: 2026
企业导师: 束小康

指导教师: 谷国迎
项目成员: 宗正、包采奕、吕嘉键、沈冯杰
 项目海报
项目海报

 项目视频
项目简介
项目视频
项目简介
项目概述
本项目面向复杂环境下具身智能机器人灵巧操作需求,提出一种刚柔耦合仿人灵巧手及臂手协同控制系统。针对传统刚性机械手柔顺性不足、软体机械手负载与精确控制能力有限的问题,项目以人手结构与操作机理为参考,融合刚性主动自由度、气动软体手指、高灵敏度视触觉传感器和多通道控制系统,构建兼具灵巧性、适应性与交互安全性的仿人操作末端。系统进一步与人形机器人和外骨骼平台集成,实现从单手抓取到双手协同任务的具身操作验证,为新一代智能机器人末端执行器设计提供了工程化方案。
项目目标
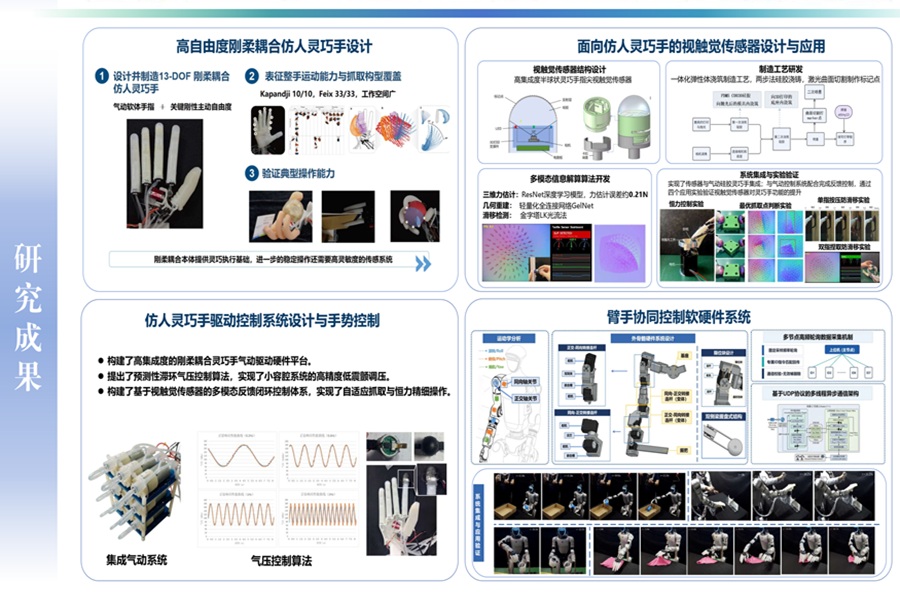
项目主要目标是构建一套集“操作、感知、控制、平台集成”于一体的刚柔耦合仿人灵巧手系统。首先,设计高自由度刚柔耦合手体,通过软体手指实现柔顺包络,通过拇指对掌、食指侧摆和掌弓调节等主动机构提升精细操作能力。其次,开发面向灵巧手的视触觉复合感知模块,获取接触、形变、滑移和操作状态等信息。再次,建立多通道驱动与控制系统,实现气动驱动、刚性关节和传感反馈的协调控制。最后,将灵巧手集成至臂手协同外骨骼及人形机器人平台,验证其在复杂任务中的适应性和可用性。
项目成果
项目完成了13自由度刚柔耦合仿人灵巧手样机设计与系统集成,形成了包含高自由度灵巧手本体、视触觉传感器、多通道驱动控制系统和臂手协同平台的完整具身操作系统。实验结果表明,该灵巧手具备良好的仿人抓取与操作能力,可完成多类典型抓取构型,并在卡片夹取、球体包络、书本抓取、物体递交、抽屉操作、毛巾折叠和双手倾倒等任务中表现出较好的环境适应性与协同操作能力。项目验证了刚柔耦合结构在提升灵巧性、柔顺性和任务泛化能力方面的有效性,为复杂交互场景下机器人灵巧操作提供了可推广的设计思路。




